VEHÍCULOS AÉREOS NO TRIPULADOS EN LA GESTIÓN DE EMERGENCIA
POR DESASTRE
Oscar Díaz Olariaga [1]
(Manuscrito recibido el 3 de abril de 2024,
en versión final 3 de diciembre de 2024)
Para citar este documento
Díaz Olariaga, O. (2024). Vehículos aéreos no tripulados en la gestión
de emergencia por desastre. Boletín geográfico, 46, https://id.caicyt.gov.ar/ark:/s2313903x/fq9l08179
Resumen
El crecimiento acelerado de los
vehículos aéreos no tripulados, también conocidos como drones, y su aplicación
en varios campos de actuación ofrece una oportunidad para su uso en la gestión
de emergencia debido a un desastre. Las diversas tecnologías que pueden
incorporar los vehículos aéreos no tripulados dotan a los mismos de
aplicaciones que pueden ser de gran utilidad en una gestión de desastre, por
ejemplo, podrían analizar en detalle (vía mapeo) la región afectada, ayudarían
a construir una red de comunicación entre los sobrevivientes de la catástrofe y
los equipos de rescate y las redes móviles más cercanas, y podrían recoger todo
tipo de información y datos que se transmitiría de forma inmediata al centro de
gestión de la emergencia para la toma de decisiones. Entonces, el presente
trabajo de revisión analiza las potenciales funcionalidades y prestaciones de
los vehículos aéreos no tripulados, como soporte tecnológico en la gestión de
emergencias, considerando tanto la tipología de desastre como su actuación en
las diferentes fases de desarrollo del desastre y su gestión.
Palabras clave: dron, respuesta a desastres, gestión de riesgos.
UNMANNED AIR VEHICLES
IN DISASTER EMERGENCY MANAGEMENT
Abstract
The accelerated growth of unmanned aerial vehicles,
also known as drones, and their application in various fields of action present
an opportunity for their use in emergency management during a disaster. The
various technologies that unmanned aerial vehicles can incorporate provide them
with applications that can be very useful in disaster management, for example,
they can analyze in detail (via mapping) the affected region, assist in
building a network of communication between the survivors of the catastrophe
and the nearest rescue teams and mobile networks, and collect all types of
information and data that can be immediately transmitted to the emergency
management center for decision making. Therefore, this review analyzes the
potential functionalities and benefits of unmanned aerial vehicles, as
technological support in emergency management, considering both the typology of
disaster and its performance in the different phases of disaster development
and its management.
Keywords: drone, disaster response, risk
management.
Introducción
Los
desastres amenazan la vida humana en diferentes grados según el entorno, la
geografía, la preparación y la respuesta. Según un estudio del Centro de
Investigación sobre Epidemiología de Desastres y la Oficina de las Naciones
Unidas para la Reducción del Riesgo de Desastres, el total de muertes humanas
relacionadas con desastres, entre los años 2000 y 2019, asciende a 1,23
millones, y tuvo un costo económico aproximado de casi 3 billones USD
(CRED-UNDRR, 2020). Aunque el avance de la tecnología ha mejorado la eficiencia
de la gestión de desastres en las últimas dos décadas, el número de muertes
relacionadas con desastres ha aumentado ligeramente en comparación con el
periodo 1980-1999. Este ligero aumento se debe a la creciente frecuencia y
gravedad de los desastres, con un aumento de alrededor del 175% en el número de
desastres. Se cree que el calentamiento global es la causa principal, duplicando
el número de inundaciones y tormentas en los últimos 20 años (CRED-UNDRR,
2020). Si bien algunos desastres se pueden prevenir, la mayoría de estos son
impredecibles. Sin embargo, las pérdidas causadas por todo tipo de desastre
pueden mitigarse en gran medida mediante el establecimiento de sistemas de
gestión de desastres eficientes y receptivos (Vakis,
2006; Tan, Guo, Mohanarajah
& Zhou, 2021).
La
respuesta a desastres requiere decisiones y acciones precisas, rápidas y
veloces. La complejidad y el arduo proceso de trabajar en un entorno muy
incierto y dinámico complican aún más la situación. Aunque los desastres pueden
tener similitudes, cada desastre tiene su propia singularidad debido a las
circunstancias, el área geográfica y el alcance de la devastación. Cualesquiera
que sean las circunstancias y la situación, se debe realizar una evaluación
inmediata y en tiempo real de las condiciones del lugar del desastre. Sin
embargo, en algunas situaciones la evaluación se ve obstaculizada debido a una
accesibilidad física limitada o nula y/o consideraciones de riesgo para la
seguridad (Chaudhary & Piracha,
2021).
Para
superar las limitaciones en la gestión del desastre, uno de los soportes
tecnológicos de rápido desarrollo es la utilización de vehículos aéreos no
tripulados (más conocidos por su acrónimo en inglés UAV - Unmanned
Aerial Vehicle) o
también denominados drones en la gestión de desastres, incluido el apoyo a la
conciencia situacional (Zwegliński, 2020; Esteve
& Benlloch, 2017). En este estudio, cuando se mencionen los UAV se incluyen
drones, aeronaves no tripuladas, sistemas aéreos no tripulados, aeronaves
pilotadas a distancia y sistemas de aeronaves pilotadas a distancia.
En la
gestión de desastres, para llevar a cabo de manera eficiente tareas complejas
en tiempo real, se requiere la coordinación de vehículos aéreos no tripulados
en muchas aplicaciones, como monitoreo de actividad, comunicación inalámbrica
en áreas amplias, etc. (Khan, Gupta & Gupta, 2020). Se espera que los UAV
cambien el campo de las comunicaciones e incorporen innovaciones en las
aplicaciones de gestión de desastres para minimizar los riesgos y proporcionar soluciones
eficaces (Zhao et al., 2019; Khan et al., 2020). Así, el uso de UAV en una
catástrofe reduce el tiempo necesario para localizar a las víctimas y el tiempo
necesario para una posterior intervención buscando en una gran zona en un corto
periodo de tiempo, además de proporcionar información crítica a los rescatistas
sobre la ruta que debe tomarse durante las operaciones de búsqueda y salvamento
(van Tilburg, 2017). Además, los drones son capaces
de buscar víctimas vivas enterradas bajo los escombros utilizando sensores como
detección de ruido, detección binaria, vibración y detección de calor (Thavasi & Suriyakala, 2012).
Estos demuestran los beneficios de tener drones en el lugar durante los
desastres y la capacidad de los mismos como
herramientas críticas para adquirir imágenes aéreas.
Por estas
razones, la gestión de desastres asistida por UAV ha atraído recientemente la
atención de la comunidad científica (Erdelj, Natalizio, Chowdhury & Akyildiz, 2017; Ejaz, Azam, Saadat, Iqbal & Hanan, 2019).
Por ello, en los últimos años, la academia ha contribuido con muchos estudios e
investigaciones sobre los beneficios que pueden aportar los vehículos aéreos no
tripulados en el campo de la gestión de desastres (Erdelj
& Natalizio, 2016; Mozaffari,
Saad, Bennis, Nam & Debbah,
2019;), principalmente con un fuerte enfoque tecnológico de dichas
investigaciones (es decir más centrados en aspectos técnicos de diseño,
configuración y operación de los UAV). Asimismo, aún es necesario profundizar
más en algunas áreas como las funcionalidades, prestaciones y actuaciones de
los UAV en las diferentes etapas en el desarrollo de la gestión de un desastre
(y según la tipología de dicho desastre), aspecto en donde se verifica un
importante vacío en la literatura científica. Este enfoque es, entonces, el
abordado en el presente artículo.
El resto
del artículo tiene la siguiente estructura: En la siguiente sección de presenta
el planteamiento metodológico adoptado. En una sección posterior, y a nivel de
resultado, se desarrolla el núcleo principal del trabajo en donde se presentan
y analizan los siguientes conceptos (en relación con la funcionalidad de los
UAV en la gestión de desastres): características básicas de los UAV,
funcionalidad de los UAV, prestaciones de los UAV según el tipo de desastre a
gestionar, tareas asistidas por UAV durante la gestión del desastre. Y,
finalmente, en la última sección del artículo se formulan las oportunas
conclusiones.
Metodología
Para el
presente trabajo se utilizó una metodología típica en este tipo de
investigación denominada ‘mapeo sistemático’, que es el proceso de identificar,
categorizar y analizar la literatura existente que es relevante para un
determinado tema de investigación (Salama, Bahsoon & Bencomo, 2017; Barn, Barat
& Clark, 2017; James, Randall & Haddaway,
2016; Taipalus, 2023; Haakonsen,
Ronnquist & Labonnote,
2023). El objetivo de esta revisión es mostrar una perspectiva general del
campo científico relacionado, en este caso, con la funcionalidad de los
vehículos aéreos no tripulados (UAV / drones) en la gestión de desastres. Este
mapeo sistemático se desarrolla en tres bloques básicos: (a) definición para la
búsqueda, donde se define la pregunta de investigación, el alcance de la
revisión, los criterios de inclusión y exclusión, y finalmente la cadena de
búsqueda; (b) ejecución de la búsqueda, y (c) análisis y discusión de los
resultados.
En lo que
se refiere a la definición de la búsqueda, las preguntas de investigación son
aquellas relacionadas a los fundamentos del concepto doble o dual ‘UAV / gestión
de desastres’, a saber: ¿por qué son necesarios los UAV en la gestión de un
desastre? ¿cuáles son las prestaciones de los UAV en la gestión de un desastre?
Y finalmente ¿cuál es el rol funcional del UAV según la tipología del desastre?
En cuanto al
alcance de la revisión, se realizó una búsqueda en los siguientes catálogos
digitales: ScienceDirect, IEEE Xplore,
Taylor & Francis, Springer, Wiley, SAGE y JSTOR. Para la búsqueda se utilizaron los siguientes descriptores: drone,
unmanned aerial vehicle, unmanned aerial system, remotely piloted aerial
vehicle, remotely piloted aircraft systems, natural disaster, emergency
management, disaster management, disaster response, search
and rescue. El periodo
temporal de búsqueda es 2010-2024 (ambos inclusive).
Para
filtrar los estudios se aplicaron los siguientes criterios de inclusión /
exclusión: (a) se incluyeron todas aquellas publicaciones científicas que solo
tengan relación con el campo de estudio o de investigación en curso; (b) se incluyeron
estudios editados en idioma inglés y español; (c) se incluyeron casos de
estudios, siempre y cuando aportaran un marco conceptual relacionado y con
resultados concretos, medibles y comparables; (d) se excluyeron artículos sin
diseño de investigación y sin una pregunta de investigación bien definida; (e)
se excluyeron revisiones terciarias; (f) se excluyeron trabajos de revisión
temática; (g) se excluyeron trabajos sobre encuestas de opinión o similar; (h)
se excluyeron informes y/o estudios técnicos sin base científica sólida; (i) se
excluyó toda ‘literatura gris’ que no presentara un fundamento teórico sólido,
riguroso y formal. Finalmente, en cuanto al conducta de la búsqueda, se
aplicaron dos filtros de revisión: (a) primer filtro de revisión: título del
artículo, resumen y palabras clave; (b) segundo filtro de revisión: texto
completo del artículo.
Funcionalidad
de los UAV en la gestión de desastres
Características básicas de los UAV.
Los UAV
han ganado rápidamente un gran interés para su utilización en numerosas
aplicaciones comerciales y militares emergentes (Khan, Gupta & Gupta, 2020,
2021; Abdujabarov, Shokirov,
Takhirov, Saytov & Bobomurodov, 2020; Telli et al.,
2023).
Por
ejemplo, los UAV están a la vanguardia de la adopción digital para abordar las
limitaciones vinculadas con una variedad de actividades de inspección,
monitoreo y vigilancia asociadas a la industria del petróleo y gas (Asadzadeh, Oliveira & Filho,
2022; Wanasinghe, 2020). La aplicación de UAV para
inspección, seguimiento y vigilancia aérea no es nueva. Los UAV se han
utilizado durante una década en sectores como la construcción (Asnafi & Dastgheibifard,
2018; Tatum & Liu, 2017), minería (Lee & Choi, 2016; Rathore, 2015), logística (Murray & Chu, 2015),
agricultura (Mogili & Deepak,
2018; Park, Das & Park, 2015), gestión de desastres (Erdelj
& Natalizio, 2016; Erdelj, Natalizio,
Chowdhury & Akyildiz,
2017), vigilancia (Zhang, 2024; Fang & Savkin,
2024), medio ambiente (monitoreo de la calidad del aire (Villa, 2016),
monitoreo del suelo (Ivushkin, Bartholomeus,
Bregt & Pulatov, 2019),
monitoreo de cultivos (Bendig, Yu,
Aasen & Bolten, 2015), monitoreo de aguas
superficiales y subterráneas (Abolt, Caldwell, Wolaver & Pai, 2018)) y aplicaciones de defensa (Masum, Arrofi, Jati & Arifin, 2013). Existen
varios tipos de UAV, que pueden utilizarse para diferentes aplicaciones o para
realizar diferentes tareas (ver Figura 1).

Figura
1.
Tipología de UAV / drones. Fuente: CFD Flow Engineering
(2024).
Aunque
todos los tipos de UAV se pueden utilizar como soporte tecnológico o logístico
en la gestión de desastres, la mayoría de las soluciones recientes de gestión
de desastres se centran en los UAV de ala giratoria multirotor (ver Figura 2).

Figura
2. UAV /
dron Multirotor. Fuente: JOUAV (2024).
Esto se
debe en gran medida a sus especificaciones personalizables a bajo costo, (Erdelj & Natalizio, 2016; Chiaraviglio, Liu, Gutierrez
& Blefari-Melazzi, 2017; Zhao et al.,
2019; Mozaffari et al., 2019; Ali, Nguyen, Vien, Shah, & Raza, 2020;
Khan et al., 2020;) que incluyen:
a)
Flexibilidad: el
despliegue inmediato de los UAV los hace ideales para una respuesta rápida a
eventos impredecibles, como desastres en los que el tiempo podría costar vidas.
Los UAV pueden controlarse o programarse de forma remota para llegar a lugares
lejanos y peligrosos. Los UAV de ala giratoria pueden cambiar de dirección
instantáneamente y evitar obstáculos. Esta alta maniobrabilidad facilita la
optimización del despliegue dinámico, de modo que se manejen múltiples tareas
simultáneamente.
b)
Bajo costo: el
costo de los UAV está disminuyendo rápidamente, lo que atrae nuevas soluciones
innovadoras basadas en UAV a costos asequibles. El costo de los UAV depende de
múltiples factores, como el desarrollo de su tecnología, el tamaño, el rango de
alcance (o autonomía), carga útil, etc.
c)
Detección: los
UAV pueden equiparse con múltiples dispositivos de detección y cámaras. Esto
ofrece acceso inmediato a una gran cantidad de datos que, de otro modo, serían difíciles.
Los UAV pueden proporcionar vistas aéreas de alta resolución y mapeo del área
objetivo en un corto período de tiempo.
d)
Comunicación:
durante desastres y emergencias, la comunicación de datos generalmente se ve
perturbada debido al aumento de la demanda o debido a daños a la
infraestructura (terrestre) de comunicaciones. Los UAV pueden ofrecer
comunicaciones a los equipos de usuario en la región del desastre, a la vez que
comunican los datos detectados a una unidad central a la que puede acceder el
equipo de gestión de desastres.
e)
Transporte /
Entrega: dada su alta estabilidad y accesibilidad, los UAV pueden entregar
rápidamente ayuda médica y bienes esenciales a las víctimas del desastre en las
áreas afectadas. Algunos UAV también pueden transportar personas o retirar
objetos dependiendo del peso máximo de carga útil del vehículo aéreo.
Por otro lado, los UAV presentan
ciertas limitaciones en cuanto a sus prestaciones generales, y en sus funciones
como soporte tecnológico en la gestión de desastres (aunque se espera que la
tecnología vaya solventando esa situación en los próximos años) (Zhao et al.,
2019; Saif et al., 2020; Khan et al.,
2020; Ali, et al., 2020 & Raza, 2020; Mohsan,
Khan, Noor, Ullah & Alsharif.,
2022). A Continuación se detallan algunas de ellas:
a)
Capacidad de la
batería a bordo del UAV: una de las principales restricciones al funcionamiento
de los vehículos aéreos no tripulados es la limitación de energía. Como
resultado, los UAV generalmente necesitan viajar a estaciones de acoplamiento
para recargar o reemplazar la batería antes de que se agote por completo. Esta
limitación podría afectar la disponibilidad de los UAV y obligar a los gestores
del desastre o la emergencia a desplegar una mayor cantidad de UAV para tener
en cuenta el tiempo necesario para recargar y viajar a una estación de recarga,
la cual, a su vez, debe estar dentro de un rango aceptable. El despliegue
eficiente de vehículos aéreos no tripulados y estaciones de recarga necesita
una cuidadosa optimización del diseño de la red de soporte o recarga
relacionada.
b)
Potencia de
procesamiento y tecnología limitadas a bordo del UAV: la instalación de
procesadores y sensores de alta calidad en el UAV puede resultar costosa. Además es relevante destacar que estos procesadores pueden
agotar rápidamente las ya limitadas baterías a bordo del UAV.
c)
Difícil
optimización y diseño de redes: el entorno dinámico y el nivel muy alto de
movilidad de los UAV plantean desafíos en la gestión de la red, incluida la
confiabilidad de las comunicaciones y la recuperación de fallas. Para
aprovechar la movilidad y accesibilidad de los UAV, se necesitan algoritmos
especiales de enrutamiento y acceso a la red para compartir datos entre los UAV
y los nodos terrestres. Además, se deben tener en cuenta los mecanismos de
recuperación y adaptación.
d)
Carga útil
limitada: el UAV puede entregar una cantidad limitada de equipos, alimentos,
medicinas, etc. debido a la limitación del tamaño de la carga física y el peso
a bordo (actualmente, no más de 5 kg).
e)
Maniobrabilidad
en entornos hostiles: es posible que los vehículos aéreos no tripulados no sean
adecuados para desastres de origen meteorológico (por ejemplo
tormentas eléctricas, huracanes, lluvias intensas, tornados, etc.).
Funcionalidad de
los UAV.
Los UAV se presentan como una de las tecnologías de
soporte más prometedoras para la gestión de desastres. Los servicios de los
sistemas UAV incluyen reconocimiento, mapeo, evaluación de estructuras, la
llegada a sobrevivientes varados y acompañamiento hacia lugares seguros, y
proporcionar comunicaciones sobre la región afectada. En varios artículos
científicos (Zeng, Zhang & Lim, 2016; Cao et al., 2018; Fotouhi et al., 2019; Mozaffari
et al., 2019; Mishra & Natalizio, 2020) se
han identificado aplicaciones diversas de los UAV en la gestión de desastres:
a)
Monitoreo,
pronóstico y alerta temprana: utilizando el monitoreo estructural y ambiental y
analizando información para pronósticos, los UAV pueden formar parte de un
sistema de alerta temprana.
b)
Fusión e
intercambio de información sobre desastres: al combinar diferentes fuentes de
información disponible o proporcionar un puente entre diferentes tecnologías de
la información, los UAV pueden respaldar otras aplicaciones durante la gestión
de desastres. Por ejemplo, se puede configurar un sistema de primera respuesta
que implementa la fusión de información y que se basa en el uso de agentes
autónomos móviles que se despliegan en el área de emergencia. Otra posibilidad
sería configurar un sistema donde múltiples vehículos heterogéneos se unen y
son controlados y coordinados a través del ciberespacio para lograr una
operación logística compleja en misiones humanitarias automatizadas.
c)
Conciencia
situacional, apoyo logístico y de evacuación: los vehículos aéreos no
tripulados pueden ayudar a recopilar información durante la fase de desastre,
especialmente sobre el movimiento de las personas afectadas y los equipos de
rescate desplegados.
d)
Sistema de
comunicación independiente: los vehículos aéreos no tripulados pueden identificar
la infraestructura de comunicación dañada o destruida durante el desastre.
e)
Misiones de
búsqueda y rescate: los vehículos aéreos no tripulados pueden buscar y encontrar
a personas perdidas, heridas o atrapadas.
f)
Evaluación de
daños: los UAV pueden ayudar a evaluar los daños mediante diferentes métodos,
como el monitoreo del estado estructural y la inspección por video.
g)
Cobertura
informativa: los vehículos aéreos no tripulados podrían ayudar a brindar
información oportuna a los medios de comunicación.
h)
Asistencia
médica/sanitaria: aunque limitados por el peso de la carga útil, los drones
especializados podrían entregar automáticamente suministros esenciales para
mantener a las personas con vida, sobre todo en los casos donde la infraestructura
de transporte se encuentre dañada.
i)
Soporte a la
reconstrucción de infraestructura: el uso de una red de vehículos aéreos no
tripulados podría acelerar el proceso de inspecciones y mejorar la eficiencia y
precisión de la reconstrucción de infraestructura.
Prestaciones
de los UAV según el tipo de desastre a gestionar.
A
continuación, se procede detallar las posibles estrategias y tareas de gestión
de desastres asistidas por vehículos aéreos no tripulados que pueden implementarse
para realizar eficientemente dichas acciones. Para implementar un sistema
eficaz que reaccione rápidamente y realice adecuadamente las tareas deseadas,
las soluciones especializadas deben tener en cuenta el tipo o tipología del
desastre y la fase en curso de dicho desastre. Los desastres son diferentes en
su naturaleza, gravedad e impacto sobre las infraestructuras e instalaciones
existentes (en la región o área del desastre) (Azari,
Rosas & Pollin, 2019; Chen, Mitra & Gesbert, 2019). Por tanto, la eficacia de diferentes
herramientas y su interacción para gestionar desastres no puede ser la misma.
Por ejemplo, como se mencionó anteriormente, la utilización de soluciones
basadas en vehículos aéreos no tripulados estará muy limitada en caso de
desastres de tipo meteorológico, como tormentas eléctricas, fuertes lluvias,
tornados, huracanes o eventos similares, ya que los UAV son vehículos aéreos
relativamente pequeños, por lo que severas condiciones meteorológicas no les
permitirían volar en las zonas afectadas por el desastre, al menos cuando este
está en pleno desarrollo. Se necesita una comprensión profunda del desastre
para prevenirlo eficientemente o minimizar su impacto (González & London,
2021). Para ello, y en este contexto, se clasifica el desastre en tres
categorías según su impacto en las infraestructuras / instalaciones terrestres
existentes en la zona / región afectada por el desastre como: (a) grave, (b)
moderado y (c) leve.
Cuando el
impacto del desastre se considera grave implica que el mismo es muy
destructivo, dinámico y genera una gran afectación en las redes de
comunicación, como pueden ser los desastres geofísicos e hidrológicos. Los
desastres de tipo geofísicos incluyen terremotos (ver Figura 3), volcanes en
erupción, deslizamientos de tierra y avalanchas, mientras que los desastres
hidrológicos incluyen tsunamis, inundaciones repentinas y flujo masivo de
escombros (Sargiacomo, Servalli,
Potito, D’Andreamatteo & Gitto,
2021; Teh & Khan, 2021). Las redes terrestres,
como las redes de sensores inalámbricos (WSN, su acrónimo en inglés) y las
redes celulares, quedan gravemente afectadas o incluso destruidas por este tipo
de desastre. Por tanto, las redes aéreas juegan un papel importante en este
escenario. La red de vehículos aéreos no tripulados debería estar altamente
equipada para que pueda llevar a cabo todo el proceso de gestión de desastres
de forma independiente o con un apoyo mínimo de las redes terrestres (Nikhil, Shreyas, Vyshnavi & Yadav, 2020). Las
redes verticales donde los vehículos aéreos no tripulados se comunican con
plataformas o satélites de gran altitud pueden ofrecer un enlace alternativo
para ayudar en las operaciones de gestión de desastres.

Figura 3. Asistencia de UAV en gestión de
terremotos. Fuente: Flytbase (2024).
Por otro lado, cuando el impacto
del desastre se considera moderado implica que el mismo es menos destructivo
que la tipología anterior. Los desastres cuyo impacto es moderado incluyen los
de tipo climatológicos como incendios forestales (ver Figura 4), desastres
hidrológicos como inundaciones, y se incluyen aquí cierto tipo de desastres
inducidos o generados por el hombre como explosiones de tipo industrial,
colapso de grandes estructuras, incendios, contaminación química y/o de
materiales peligrosos, etc. (Chen, Li, Chang & Zheng, 2021). Este tipo de
desastres impactan parcialmente las redes terrestres existentes. Por tanto, la
función del UAV, en este caso, es doble: reconectar las partes operativas de la
red terrestre y realizar otras tareas específicas (Erdelj
et al., 2017; Wu, Zeng & Zhang, 2018; Wu, Fan, Yang, Sun & Guan, 2019).
En tercer
lugar, se tienen los desastres cuyo impacto se puede considerar leve, estos
incluyen los de tipo meteorológico como tormentas tropicales, huracanes,
tormentas de arena, nevadas intensas, y fuertes lluvias; que no significan
grandes impactos en infraestructuras o en la población. En caso de desastre
meteorológico, las operaciones de los UAV son limitadas debido a las duras
condiciones. La flexible movilidad y maniobrabilidad de los UAV se ven
restringidas por fuertes vientos y tormentas. En este caso, sólo se pueden
utilizar vehículos aéreos tripulados (también con capacidad de despegue y
aterrizaje vertical) de gran tamaño, para apoyar la reconstrucción de las redes
terrestres (Sziroczak, Rohacs
& Rohacs, 2022).

Figura
4.
Asistencia de UAV en gestión de incendios forestales. Fuente: Flytbase (2024).
Tareas asistidas por UAV durante la gestión del desastre.
A
continuación, se presenta la evolución de las tareas asistidas por UAV a lo
largo del ciclo de desarrollo de un desastre. La operación de gestión de
desastres pasa por múltiples fases en las que se siguen diferentes
procedimientos para mitigar los impactos dañinos de los desastres (Erdelj et al., 2017; Sakurai
& Murayama, 2019).
Preparación: en esta fase, el desastre aún no
ha ocurrido y no hay señales directas que sugieran que pueda ocurrir en el muy
corto plazo. Por lo tanto, esta fase podría tardar varias semanas o incluso
meses antes del desastre, o posiblemente ocurrir en años, en el área de
cobertura del sistema. En consecuencia, el costo y la durabilidad del sistema
en esta etapa son esenciales. Para presentar argumentos eficaces para la
gestión de desastres, esta tarea podría acompañarse de otras aplicaciones, como
monitoreo ambiental, seguridad, vigilancia y gestión de recursos (Shamsoshoara, Afghah, Blasch, Ashdown & Bennis,
2021). Se pueden formar equipos especializados que conozcan todas las posibles
aplicaciones y oportunidades para diseñar sistemas unificados, que logren
múltiples tareas requeridas por varias entidades. Debido a que las redes de
comunicaciones fijas como WSN, las comunicaciones celulares y las
comunicaciones por satélite están permitiendo numerosas aplicaciones para la
preparación ante desastres, los sistemas asistidos por vehículos aéreos no
tripulados pueden proporcionar nuevos servicios y complementar la tarea de las
redes fijas en muchos escenarios. Los sistemas asistidos por vehículos aéreos
no tripulados pueden proporcionar teledetección aérea. Se puede monitorear,
pronosticar y mapear el área de interés instalando sensores como cámaras y
sensores de medición de temperatura y concentración de gas a bordo del UAV. Los
sistemas asistidos por UAV también pueden proporcionar un medio para acceder a
WSN lejanas (Li, 2018). En lugar de un costoso despliegue de infraestructura de
comunicaciones, los vehículos aéreos no tripulados pueden viajar hacia los
dispositivos de detección para recopilar sus observaciones. Los objetivos en
esta fase son (Mishra, Garg, Narang
& Mishra, 2020): (a) proporcionar datos a los expertos en gestión de
desastres que ayuden a predecir la evolución del desastre si surge; (b)
proporcionar información sobre la región de interés, como lugares de emergencia
y rutas para entregas o evacuaciones; y (c) proporcionar datos que permitan la
detección temprana de desastres.
Detección: esta fase abarca el período que
va desde el momento en que el desastre puede predecirse con alta probabilidad
hasta que efectivamente se ocurre. En términos generales, los desastres pueden
ser predecibles, según la disponibilidad de datos relevantes y las herramientas
para analizarlos. La detección de fenómenos anormales en etapas tempranas a
veces puede prevenir desastres. Por ejemplo, la detección temprana de incendios
forestales puede influir en un conjunto simple de acciones para contener su
propagación antes de que se conviertan en un desastre importante (Furutani & Minami, 2021; Kucharczyk & Hugenholtz, 2021).
Aunque se pueden recopilar datos relevantes durante la fase de preparación para
desastres, la disponibilidad de datos de manera oportuna no garantiza una
detección temprana. Se necesitan herramientas de análisis de datos para que el
sistema pueda reconocer y emitir alarmas de advertencia de forma autónoma
cuando sea necesario. Con respecto a los sistemas asistidos por UAV, el
análisis de datos se puede realizar a nivel de UAV, lo que se conoce como
computación de borde, que consiste en capturar y procesar datos lo más cerca
posible de su fuente o usuario final (normalmente la fuente de datos es un
sensor de Internet de las Cosas). El procesamiento se realiza localmente
colocando servidores u otro hardware cerca de la ubicación física de las fuentes
de datos para procesar los datos o en una unidad central, lo que se conoce como
computación en la nube (Liu, Zhang, Chen, Huang & Guo,
2020). La computación perimetral requiere capacidades informáticas adicionales
para realizar procesamiento de señales, algoritmos de verificación o
reconocimiento de características basadas en Inteligencia Artificial. La
principal limitación de este enfoque es el consumo excesivo de batería del UAV
debido a cálculos complejos. Además, el rendimiento de la detección, descrito
por las probabilidades de detección errónea y falsa alarma, se basa únicamente
en observaciones locales de vehículos aéreos no tripulados. Por otro lado, la
computación en la nube puede ser más precisa ya que hay más datos y potencia de
cálculo disponibles en la unidad central (Alhelaly, Muthanna & Elgendy, 2022).
Sin embargo, la computación en la nube introduce un retraso adicional en la
detección, ya que los datos deben transmitirse desde los UAV a una unidad
central ubicada en un lugar potencialmente lejano. En este caso, se necesita un
diseño de sistema de comunicación confiable para transmitir datos entre los UAV
y una unidad central de manera oportuna.
Evaluación: esta fase ocurre cuando un
desastre aún está en progreso. El papel de los vehículos aéreos no tripulados
se vuelve más crucial en esta etapa, ya que el desastre podría haber dañado
total o parcialmente la infraestructura de comunicación terrestre. Los
principales objetivos del sistema asistido por UAV en esta fase son
proporcionar conocimiento de la situación, realizar una inspección estructural
(p.e. en el caso de terremotos) y llevar adelante una
evaluación precisa de la situación (Avanzato & Beritelli, 2020). Esto se puede hacer inspeccionando el
área terrestre en busca de recursos disponibles y transmitiendo estos datos al
centro de control. Los vehículos aéreos no tripulados pueden suplir
temporalmente las funciones de la infraestructura de comunicación terrestre
dañada para proporcionar conectividad a la región afectada por el desastre. En
caso de un desastre con impacto severo o relevante, los UAV pueden formar una
red aérea que conecta a los usuarios cubiertos entre sí con Internet (Sabzehali et al., 2022). Los UAV también se pueden
implementar para unir nodos terrestres y relajar la carga de comunicación en
los cuellos de botella de WSN, en caso de que las redes terrestres estén
parcialmente operativas. También los UAV se pueden utilizar para representar
partes de la región topográfica y observar la presencia humana y las
infraestructuras e instalaciones inutilizables (Chen et al., 2016; Yamazaki, Kubo, Tanabe & Liu, 2017). Incluso si la infraestructura de
la red terrestre no está dañada, las comunicaciones asistidas por UAV pueden
ser útiles para proporcionar servicios aéreos que luego se entregan a través de
las redes terrestres.
Respuesta
en progreso: después
de la evaluación de los daños del desastre, el objetivo es auxiliar a personas afectadas
(ver Figura 5), prevenir pérdidas adicionales y restaurar la infraestructura y
los servicios dañados. Las redes asistidas por UAV en esta fase podrían
proporcionar conectividad a los usuarios dentro de la región afectada
transmitiendo datos a través de uno o más UAV (Xiong et
al., 2021). Esta conexión es crucial para desastres de impacto severo o
grave, ya que proporciona un medio para distribuir instrucciones de evacuación
y seguridad. Para desastres de impacto moderado o leve, las redes asistidas por
vehículos aéreos no tripulados pueden resultar útiles para gestionar las
demandas excesivas de servicios de comunicación. Por ejemplo, el desastre
podría generar una aglomeración de personas que necesitan acceso adicional a
Internet, generando una alta demanda de redes celulares. Los UAV pueden ayudar
a la red celular ofreciendo enlaces temporales de descarga de tráfico. Además
de los servicios de conectividad, diferentes tipos de cámaras y sensores;
también existen actuadores especializados montados en vehículos aéreos no
tripulados que pueden respaldar misiones de búsqueda y rescate o que podrían suministrar
medicamentos y entrega de alimentos (Yakushiji et
al., 2020).
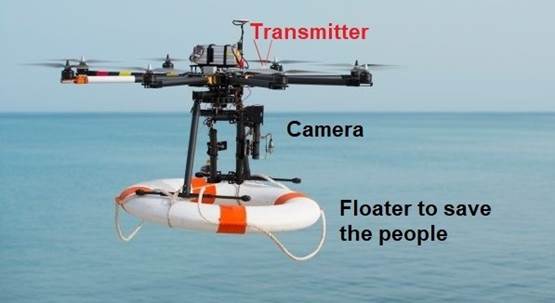
Figura
5.
Asistencia de UAV en búsqueda y auxilio de personas afectadas, por ejemplo, en
zonas acuáticas o en inundaciones. Fuente: CFD Flow Engineering
(2024).
Conclusiones
Los
desastres, en cualquiera de sus tipologías, afectan negativamente el bienestar
de la población afectada. Ahora bien, cuando los desastres son considerados
graves o catastróficos, pueden generar un gran número de víctimas, además de
una relevante afectación a las infraestructuras e instalaciones. Por lo tanto,
cuando ocurre un desastre, una respuesta rápida y efectiva es fundamental para
ayudar a la población, reduciendo el número de víctimas y mitigando el impacto
económico. Independientemente del tipo de desastre que se deba abordar, su
gestión implica un proceso o práctica que incluye mitigación, preparación,
respuesta y recuperación.
Así, el
uso de vehículos aéreos no tripulados o drones en una catástrofe tiene los
siguientes beneficios: reducen el tiempo necesario para localizar a las
víctimas lo que agiliza los procedimientos para una posterior intervención.
Esto es gracias a que se logra cubrir la búsqueda en una gran zona y/o en un
corto periodo de tiempo, y a que se proporciona información crítica a los
rescatistas sobre la ruta que debe tomarse durante las operaciones. Además, los
drones son capaces de buscar víctimas vivas enterradas bajo los escombros
utilizando sensores como detección de ruido, detección binaria, vibración y
detección de calor. La recopilación de datos precisos puede resultar
extremadamente compleja en una situación de emergencia debido a la falta de
acciones coordinadas por parte de varios organismos durante un desastre. Bajo
estas circunstancias, los UAV pueden ser muy útiles al incorporar una
combinación de herramientas de telecomunicaciones, teledetección y bases de
datos orientadas espacial y temporalmente.
Futuras
líneas de investigación, en las cuales se detecta un relevante vacío en la
actual literatura científica, podrían ser, por ejemplo: (a) la configuración de
rutas de drones dentro de zonas de exclusión aérea, sobre todo cuando esta
implica a dos o más países, para facilitar y asegurar el despliegue de
asistencia humanitaria vía vehículos aéreos no tripulados bajo situaciones de
desastres; (b) gestión de operaciones de UAV bajo condiciones climáticas
adversas, como la baja visibilidad, las lluvias torrenciales y los fuertes
vientos; la mayor parte de la literatura evalúa solo comportamiento,
prestaciones y/u operatividad de los drones en condiciones meteorológicas
típicas; (c) análisis / evaluación de protocolos en operaciones de búsqueda y
rescate mediante la utilización de UAV, dadas las limitaciones de las
especificaciones del dron, como la duración de la batería; y, finalmente (d)
evaluación de la capacidad de los drones en la identificación de víctimas, ya
que esto es fundamental en un escenario de desastre.
Bibliografía
Abdujabarov, N., Shokirov,
R., Takhirov, J., Saytov,
K. & Bobomurodov, S. (2020). Prospects of the development of unmanned aerial vehicles (UAVs).
Aerospace Engineering. https://onx.la/7efec
Abolt, C., Caldwell, T., Wolaver,
B. & Pai, H. (2018). Unmanned aerial vehicle based
monitoring of groundwater inputs to surface waters using an economical thermal
infrared camera. Optical Engineering, 57(5), 053113. DOI:
https://doi.org/10.1117/1.OE.57.5.053113
Ali, K., Nguyen, H., Vien, Q., Shah, P. &
Raza, M. (2020). Deployment of drone-based small cells for public safety
communication system. IEEE Systems Journal. DOI: 10.1109/JSYST.2019.2959668
Alhelaly, S., Muthanna, A. & Elgendy, I. (2022). Optimizing Task Offloading Energy in
Multi-User Multi-UAV-Enabled Mobile Edge-Cloud Computing Systems. Applied
Sciences, 12, 6566. DOI: 10.3390/app12136566
Asadzadeh, S., Oliveira, W. &
Filho, C. (2022). UAV-based remote sensing for the petroleum industry and
environmental monitoring: State-of-the-art and perspectives. Journal of
Petroleum Science and Engineering, 208, 109633. DOI:
https://doi.org/10.1016/j.petrol.2021.109633
Asnafi, M. & Dastgheibifard,
S. (2018). A review on potential applications of unmanned aerial vehicle for
construction industry. Sustainable Structure and Materials, 1(2), 44-53.
DOI: https://doi.org/10.26392/SSM.2018.01.02.044
Avanzato, R. & Beritelli, F. (2020). A Smart UAV-Femtocell Data Sensing
System for Post-Earthquake Localization of People. IEEE Access, 8, 30262-30270.
DOI: 10.1109/ACCESS.2020.2972699
Azari, M., Rosas, F. & Pollin, S. (2019).
Cellular connectivity for UAVs: Network modeling, performance analysis, and
design guidelines. IEEE Transactions on Wireless Communications, 18(7),
3366–3381. DOI: 10.1109/TWC.2019.2910112
Barn, B., Barat, S. & Clark, T. (2017). Conducting Systematic
Literature Reviews and Systematic Mapping Studies. Proceedings of the 10th
Innovations in Software Engineering Conference. DOI: 10.1145/3021460.3021489
Bendig, J., Yu,
K., Aasen, H. & Bolten, A. (2015). Combining UAV-based plant height from crop surface models, visible, and
near infrared vegetation indices for biomass monitoring in barley.
International Journal of Applied Earth Observation and Geoinformation,
39, 79-87. DOI: https://doi.org/10.1016/j.jag.2015.02.012
Cao, X., Yang, P., Alzenad, M., Xi, X., Wu, D.
& Yanikomeroglu, H. (2018). Airborne
communication networks: A survey. IEEE Journal on Selected Areas in
Communications, 36(9), 1907–1926. DOI: 10.1109/JSAC.2018.2864423
Chaudhary, T. & Piracha, A. (2021). Natural
Disasters-Origins, Impacts, Management. Encyclopedia, 1(4), 1101-1131. DOI:
10.3390/encyclopedia1040084
Chen, J., Liu, H., Zheng, J., Lv, M., Yan, B.,
Hu, X. & Gao, Y. (2016). Damage degree evaluation of earthquake area using
UAV aerial image. International Journal of Aerospace Engineering, 2052603. DOI:
10.1155/2016/2052603
Chen, J., Mitra, U. & Gesbert, D. (2019).
Optimal UAV relay placement for single user capacity maximization over terrain
with obstacles. 20th International Workshop on Signal Processing Advances in
Wireless Communications. DOI: 10.1109/SPAWC.2019.8815496
Chen, Y., Li, C., Chang, C. & Zheng, M. (2021). Identifying the
influence of natural disasters on technological innovation. Economic Analysis
and Policy, 70, 22-36. DOI: 10.1016/j.eap.2021.01.016
Chiaraviglio, L., Liu, W., Gutierrez, J.
& Blefari-Melazzi, N. (2017). Optimal pricing
strategy for 5G in rural areas with unmanned aerial vehicles and large cells.
27th International Telecommunication Networks and Applications Conference. DOI:
10.1109/ATNAC.2017.8215406
CFD Flow Engineering (2024). Classification and Application of Drones.
https://acortar.link/yf7kUX
CRED-UNDRR (2020). The human cost of disasters: an overview of the last
20 years (2000-2019). Disaster Epidemiology Research Center / United Nations
Office for Disaster Risk Reduction. https://onx.la/23e19
Ejaz, W., Azam, M., Saadat, S., Iqbal, F. &
Hanan, A. (2019). Unmanned Aerial Vehicles enabled IoT Platform
for Disaster Management. Energies, 12, 2706. DOI: 10.3390/en12142706
Erdelj, M. & Natalizio, E. (2016). UAV-assisted disaster management: Applications and open issues. 2016
International Conference on Computing, Networking and Communications. DOI:
10.1109/ICCNC.2016.7440563
Erdelj, M., Natalizio, E.,
Chowdhury, K. & Akyildiz, I. (2017). Help from
the Sky: Leveraging UAVs for Disaster Management. IEEE Pervasive Computing,
16(1), 24-32. DOI: 10.1109/MPRV.2017.11
Esteve, J. & Benlloch,
C. (2017). Rights and Science in the Drone Era Actual Challenges in the Civil
Use of Drone Technology. Rights and Science. https://onx.la/4cf50
Fang, Z. & Savkin, A. (2024). Strategies
for Optimized UAV Surveillance in Various Tasks and Scenarios: A Review. Drones,
8, 193. DOI: https://doi.org/10.3390/drones8050193
Flytbase (2024). Drone for Disaster
Management-How Drones are Used for Emergency Response.
https://acortar.link/Bw2gvm
Fotouhi, A., Qiang,
H., Ding, M., Hassan, M., Giordano, L., Garcia-Rodriguez, A. & Yuan,
J. (2019). Survey on UAV cellular communications: Practical aspects, standardization
advancements, regulation, and security challenges. IEEE Communications Surveys
Tutorials, 21(4), 3417–3442. DOI: 10.1109/COMST.2019.2906228
Furutani, T. & Minami, M.
(2021). Drones for Disaster Risk Reduction and Crisis Response. In: Sakurai,
M., Shaw, R. (Eds.) Emerging Technologies for Disaster Resilience. Disaster
Risk Reduction. Singapore: Springer. DOI: 10.1007/978-981-16-0360-0_4
González, F. & London, S. (2021). Desastres naturales y su impacto. Una revisión
metodológica. (2021). Visión de Futuro, 25(1), 43-52. DOI: DOI:
10.36995/j.visiondefuturo.2021.25.01.002.es
Haakonsen, S., Ronnquist,
A. & Labonnote,
N. (2023). Fifty years of shape grammars: A systematic mapping of its
application in engineering and architecture. International Journal of
Architectural Computing, 21(1), 5-22. DOI: 10.1177/14780771221089882
Ivushkin, K., Bartholomeus, H., Bregt, A. & Pulatov, A.
(2019). UAV based soil salinity assessment of cropland. Geoderma,
338, 502-512. DOI: https://doi.org/10.1016/j.geoderma.2018.09.046
James, K., Randall, N. & Haddaway, N.
(2016). A methodology for systematic mapping in environmental sciences. Environmental Evidence, 5, 7. DOI:
10.1186/s13750-016-0059-6
JOUAV (2024). Emergency Response.
https://www.jouav.com/industry/emergency-response
Khan, A., Gupta, S. & Gupta,
K. (2020). Multi-hazard disaster studies: Monitoring, detection, recovery, and
management, based on emerging technologies and optimal techniques.
International Journal of Disaster Risk Reduction, 47, 101642. DOI:
10.1016/j.ijdrr.2020.101642
Khan, A., Gupta, S. & Gupta, K. (2021). Unmanned aerial
vehicle‐enabled layered architecture based solution
for disaster management. Transactions on Emerging Telecommunications
Technologies, 32(12), e4370, 1-29. DOI: 10.1002/ett.4370
Kucharczyk, M. & Hugenholtz, C. (2021). Remote sensing of natural
hazard-related disasters with small drones: Global trends, biases, and research
opportunities. Remote Sensing of Environment, 264, 112577. DOI:
https://doi.org/10.1016/j.rse.2021.112577
Lee, S. & Choi, Y. (2016). Reviews of unmanned aerial vehicle (drone)
technology trends and its applications in the mining industry. Geosystem
Engineering, 19(4), 197–204. DOI:
https://doi.org/10.1080/12269328.2016.1162115
Li, X. (2018). Deployment of drone base stations for cellular
communication without apriori user distribution
information. 37th IEEE Chinese Control Conference. DOI:
10.23919/ChiCC.2018.8482797
Liu, B., Zhang, W., Chen, W., Huang, H. & Guo, S. (2020). Online
Computation Offloading and Traffic Routing for UAV Swarms in Edge-Cloud
Computing. IEEE Transactions on Vehicular Technology, 69(8), 8777-8791. DOI:
10.1109/TVT.2020.2994541
Masum, M., Arrofi, M., Jati,
G. & Arifin, F. (2013). Simulation of intelligent unmanned aerial vehicle
(UAV) for military surveillance. 2013 International Conference on Advanced
Computer Science and Information Systems. DOI: 10.1109/ICACSIS.2013.6761569
Mishra, B., Garg, D., Narang, P. & Mishra, V. (2020).
Drone-surveillance for search and rescue in natural disaster. Computer
Communications, 156. DOI: 10.1016/j.comcom.2020.03.012
Mishra, D. & Natalizio, E. (2020). A survey
on cellular-connected UAVs: Design challenges, enabling 5G/B5G innovations, and
experimental advancements. Computer Networks, 182(9), 107451. DOI: 10.1016/j.comnet.2020.107451
Mogili, U. & Deepak, B. (2018). Review on
application of drone systems in precision agriculture. Procedia Computer
Science, 133, 502-509. DOI: https://doi.org/10.1016/j.procs.2018.07.063
Mohsan, S., Khan, M., Noor, F., Ullah, I. & Alsharif, M. (2022). Towards the Unmanned Aerial Vehicles
(UAVs): A Comprehensive Review. Drones, 6(6), 147. DOI: 10.3390/drones6060147
Mozaffari, M., Saad, W., Bennis, M.,
Nam, Y. & Debbah, M. (2019). A tutorial on UAVs
for wireless networks: Applications, challenges, and open problems. IEEE
Communications Surveys & Tutorials, 21(3), 2334-2360. DOI:
10.1109/COMST.2019.2902862
Murray, C. & Chu, A. (2015). The flying sidekick traveling salesman
problem: Optimization of drone-assisted parcel delivery. Transportation
Research Part C, 84, 86-109. DOI: https://doi.org/10.1016/j.trc.2015.03.005
Nikhil, N., Shreyas, S., Vyshnavi, G. &
Yadav, S. (2020). Unmanned Aerial Vehicles (UAV) in Disaster Management
Applications. Third International Conference on Smart Systems and Inventive
Technology. DOI: 10.1109/ICSSIT48917.2020.9214241
Park, J., Das, A. & Park, J. (2015). Application trend of unmanned
aerial vehicle (UAV) image in agricultural sector: Review and proposal. Korean
Journal of Agricultural Science, 42(3), 269-276. DOI:
https://doi.org/10.7744/cnujas.2015.42.3.269
Rathore, N. (2015). Unlocking the potentiality of UAVs in mining industry
and its implications. International Journal of Innovative Research in
Science, Engineering and Technology, 4(3), 852-855. DOI:
10.15680/IJIRSET.2015.0403007
Sabzehali, J., Shah, V., Fan, Q.,
Choudhury, B., Liu, L. & Reed, J. (2022). Optimizing Number, Placement, and
Backhaul Connectivity of Multi-UAV Networks. IEEE Internet of Things Journal,
9(21), 21548-21560. DOI: 10.1109/JIOT.2022.3184323
Saif, A., Dimyati, K., Noordin, K., Shah, N., Abdullah, Q. & Mukhlif, F. (2020). Unmanned Aerial Vehicles for
Post-Disaster Communication Networks. 10th International Conference on System
Engineering and Technology. DOI: 10.1109/ICSET51301.2020.9265369
Salama, M., Bahsoon, R. & Bencomo, N.
(2017). Managing Trade-offs in Self-Adaptive Software Architectures: A
Systematic Mapping Study. En Mistrik
et al. (Eds.), Managing Trade-offs in Adaptable Software Architectures
(249-297). Amsterdam: Elsevier. DOI: 10.1016/B978-0-12-802855-1.00011-3
Sakurai, M. & Murayama, Y. (2019). Information technologies and
disaster management – Benefits and issues. Progress in Disaster Science, 2,
100012. DOI: 10.1016/j.pdisas.2019.100012
Sargiacomo, M., Servalli,
S., Potito, S., D’Andreamatteo,
A. & Gitto, A. (2021). Accounting for natural
disasters from a historical perspective: A literature review and research
agenda. Accounting History, 26(2), 179-204. DOI: 10.1177/10323732211003173
Shamsoshoara, A., Afghah,
F., Blasch, E., Ashdown, J. & Bennis, M. (2021).
UAV-Assisted Communication in Remote Disaster Areas using Imitation Learning.
IEEE Open Journal of the Communications Society, 2, 738-753. DOI:
10.1109/OJCOMS.2021.3067001
Sziroczak, D., Rohacs,
D. & Rohacs, J. (2022). Review of using small UAV
based meteorological measurements for road weather management. Progress in
Aerospace Sciences, 134, 100859. DOI: 10.1016/j.paerosci.2022.100859
Taipalus, T. (2023). Systematic
Mapping Study in Information Systems Research. Journal of the Midwest
Association for Information Systems, 1, 2. DOI: 10.17705/3jmwa.000079
Tan, L., Guo,
J., Mohanarajah, S. & Zhou, K. (2021). Can we detect trends
in natural disaster management with artificial intelligence? A review of
modeling practices. Natural Hazards, 107, 2389–2417. DOI:
10.1007/s11069-020-04429-3
Tatum, M. & Liu, J. (2017). Unmanned aircraft system applications in
construction. Procedia Engineering, 196, 167-175. DOI:
https://doi.org/10.1016/j.proeng.2017.07.187
Teh, D. & Khan, T. (2021). Types, Definition
and Classification of Natural Disasters and Threat Level. In: Eslamian, S., Eslamian, F.
(Eds.), Handbook of Disaster Risk Reduction for Resilience. Cham: Springer.
DOI: 10.1007/978-3-030-61278-8_2
Telli, K., Kraa, O., Himeur, Y., Ouamane, A., Boumehraz, M., Atalla, S. & Mansoor, W. (2023). A
Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles
(UAVs). Systems, 11, 400. DOI: 10.3390/systems11080400
Thavasi, P. & Suriyakala,
C. (2012). Sensors and tracking methods used in wireless sensor network based
unmanned search and rescue system - A review. Procedia Engineering, 38,
1935-1945. DOI: 10.1016/j.proeng.2012.06.236
Vakis, R. (2006). Complementing Natural Disasters
Management: The Role of Social Protection. SP Discussion Paper, 0543. Social
Protection. https://onx.la/27974
van Tilburg, C. (2017). First Report of Using Portable Unmanned Aircraft
Systems (Drones) for Search and Rescue. Wilderness and Environmental Medicine,
28(2), 116–118. DOI: 10.1016/j.wem.2016.12.010
Villa, T. (2016). Development and validation of a UAV based system for
air pollution measurements. Sensors, 16(2), 2202. DOI:
https://doi.org/10.3390/s16122202
Wanasinghe, T. (2020). Unmanned Aerial
Systems for the Oil and Gas Industry: Overview, Applications, and Challenges. IEEE
Access. DOI: 10.1109/ACCESS.2020.3020593
Wu, Q., Zeng, Y. & Zhang, R. (2018). Joint trajectory and
communication design for multi-UAV enabled wireless networks. IEEE Transactions
on Wireless Communications, 17(3), 2109-2121. DOI: 10.1109/TWC.2017.2789293
Wu, Y., Fan, W., Yang, W., Sun, X. & Guan, X. (2019). Robust
trajectory and communication design for multi-UAV enabled wireless networks in
the presence of jammers. IEEE Access, 8, 2893-2905. DOI:
10.1109/ACCESS.2019.2962534
Xiong, Z., Zhang, Y., Lim, W., Kang, J., Niyato, D., Leun, C. & Miao,
C. (2021). UAV-Assisted Wireless Energy
and Data Transfer with Deep Reinforcement Learning. IEEE Transactions on Cognitive Communications
and Networking, 7(1), 85-99. DOI: 10.1109/TCCN.2020.3027696
Yakushiji, K., Fujita, H., Murata,
M., Hiroi, N., Hamabe, Y.
& Yakushiji, F. (2020). Short-Range
Transportation Using Unmanned Aerial Vehicles (UAVs) during Disasters in Japan.
Drones, 4, 68. DOI:
10.3390/drones4040068
Yamazaki, F., Kubo,
K., Tanabe, R. & Liu, W. (2017). Damage assessment and 3d modeling by UAV flights after the 2016 Kumamoto,
Japan earthquake. IEEE International Geoscience and Remote Sensing Symposium.
DOI: 10.1109/IGARSS.2017.8127673
Zeng, Y., Zhang, R. & Lim, T. (2016). Wireless communications with
unmanned aerial vehicles: opportunities and challenges. IEEE Communications
Magazine, 54(5), 36–42. DOI: 10.1109/MCOM.2016.7470933
Zhang, Y. (2024). Perceptive Mobile Networks for Unmanned Aerial Vehicle
Surveillance: From the Perspective of Cooperative Sensing. IEEE Vehicular
Technology Magazine, 19(2), 60-69. DOI: 10.1109/MVT.2024.3373931
Zhao, N., Lu, W., Sheng, M., Chen, Y., Tang, J., Yu, F. & Wong, K.
(2019). UAV-assisted emergency networks in disasters. IEEE Wireless
Communications, 26(1), 45-51. DOI: 10.1109/ MWC.2018.1800160
Zwegliński, T. (2020). The use of
drones in disaster aerial needs reconnaissance and damage assessment -
three-dimensional modeling and orthophoto map study. Sustain, 12, 1–20. DOI:
10.3390/su12156080